

Abẹrẹ igbáti manipulator
Wo siwaju sii>>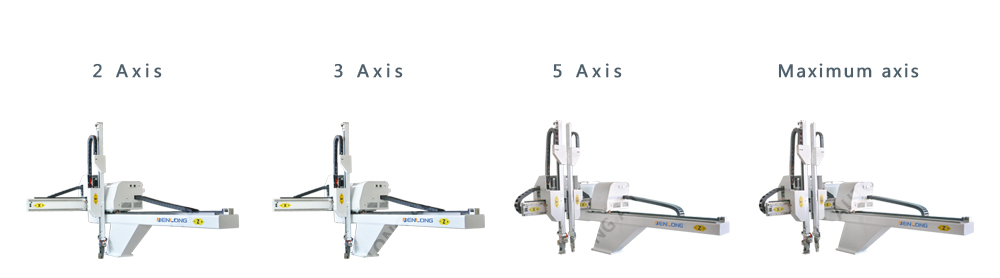
Ipese agbara: 1CAC220V+10V50/60HZ
Ṣiṣẹ afẹfẹ titẹ: 5kgf / cm20.49Mpa
O pọju Allowable air titẹ: 8kgf / cm0.8Mpa
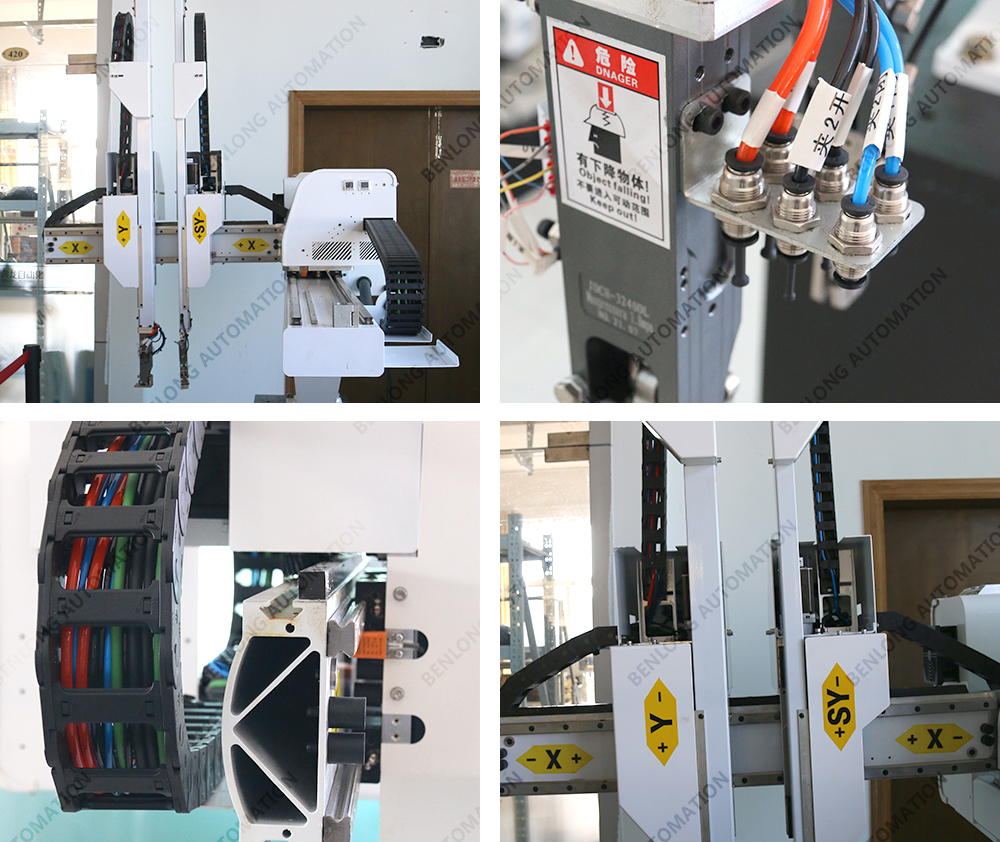
Ọna wakọ: XZ inverter ypeneumatic Silinda
Zezi:90FixedPneumatic
Iṣakoso eto
NC Iṣakoso
Kọ ifiranṣẹ rẹ nibi ki o si fi si wa





