

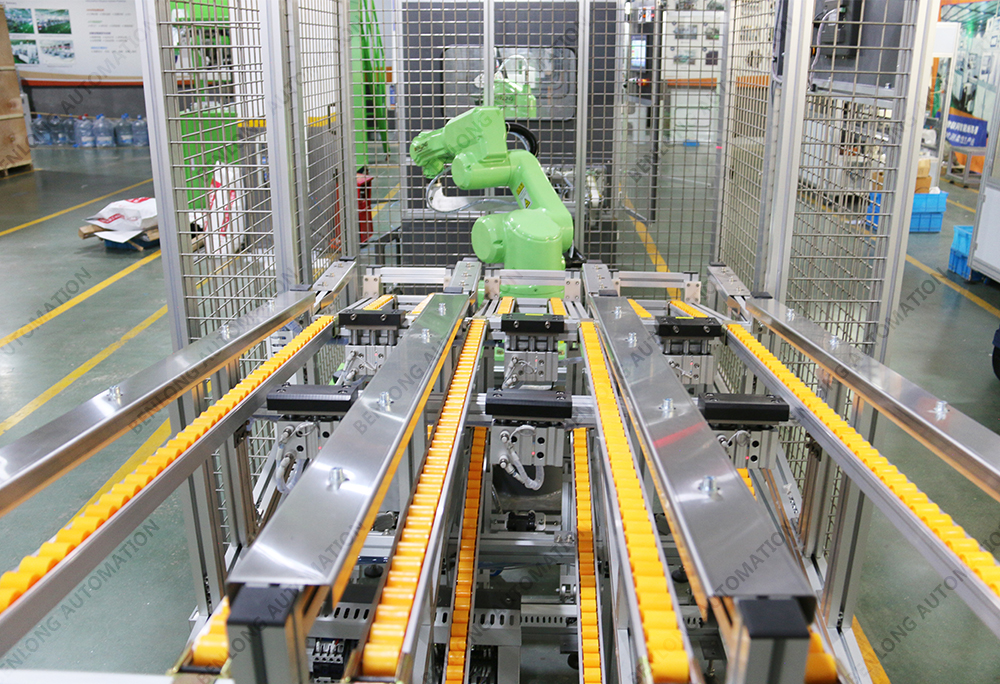
Upakiaji na upakuaji otomatiki wa roboti za ulinzi wa upasuaji
Tazama Zaidi>>

1. Voltage ya pembejeo ya vifaa 220V/380V ± 10%, 50Hz; ± 1Hz;
2. Nguzo zinazooana na kifaa: 1P, 2P, 3P, 4P, 5P
3. Mdundo wa uzalishaji wa vifaa: Sekunde 1 kwa nguzo, sekunde 1.2 kwa nguzo, sekunde 1.5 kwa nguzo, sekunde 2 kwa nguzo na sekunde 3 kwa nguzo; Vipimo vitano tofauti vya vifaa.
4. Bidhaa sawa ya sura ya shell inaweza kubadili kati ya nambari tofauti za pole kwa kubofya mara moja; Bidhaa tofauti za sura ya shell zinahitaji uingizwaji wa mwongozo wa molds au fixtures.
5. Vifaa vya kurekebisha vifaa vinaweza kubinafsishwa kulingana na mfano wa bidhaa.
6. Vigezo vya laser vinaweza kuhifadhiwa kabla katika mfumo wa udhibiti kwa ajili ya kurejesha moja kwa moja na kuashiria; Vigezo vya kuashiria vya msimbo wa QR vinaweza kuwekwa kiholela, kwa ujumla ≤ biti 24.
7. Kifaa kina vitendaji vya kuonyesha kengele kama vile kengele ya hitilafu na ufuatiliaji wa shinikizo.
8. Kuna mifumo miwili ya uendeshaji inapatikana: Kichina na Kiingereza.
9. Vifaa vyote vya msingi vinaagizwa kutoka nchi na maeneo mbalimbali kama vile Italia, Uswidi, Ujerumani, Japan, Marekani, Taiwan, nk.
10. Kifaa kinaweza kuwa na vitendaji kama vile "Mfumo Mahiri wa Uchambuzi wa Nishati na Uhifadhi wa Nishati" na "Smart Equipment Service Cloud Platform Big Data Cloud".
11. Kuwa na haki miliki huru na huru





