

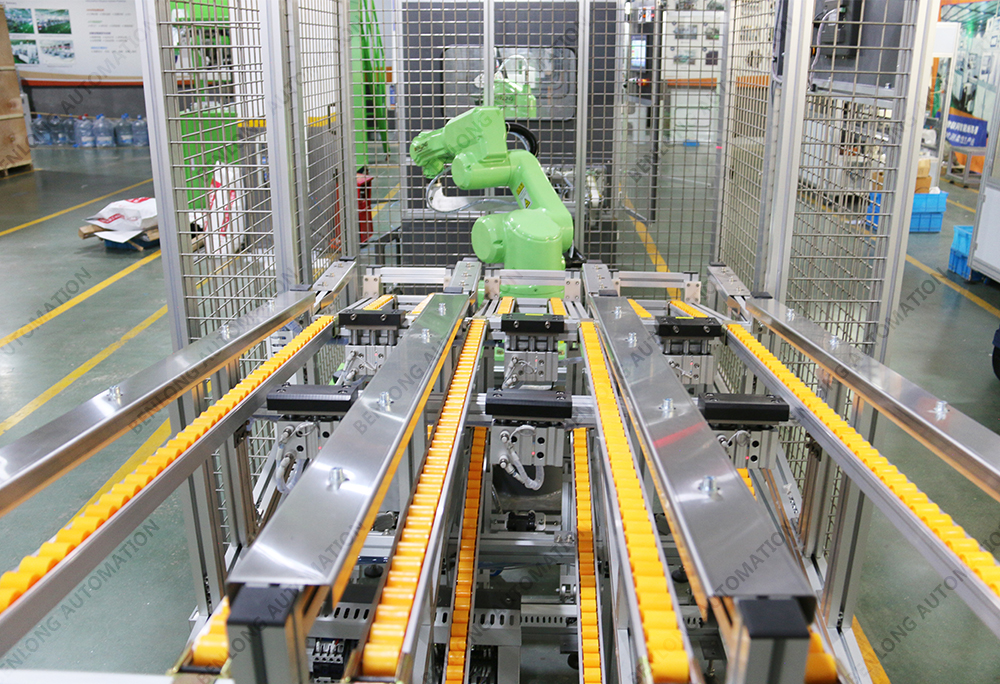
සර්ජ් ප්රොටෙක්ටර් රොබෝවරු ස්වයංක්රීයව පැටවීම සහ බෑම
තවත් බලන්න >>

1. උපකරණ ආදාන වෝල්ටීයතාවය 220V/380V ± 10%, 50Hz; ± 1Hz;
2. උපාංග අනුකූල පොලු: 1P, 2P, 3P, 4P, 5P
3. උපකරණ නිෂ්පාදන රිද්මය: කණුවකට තත්පර 1, කණුවකට තත්පර 1.2, කණුවකට තත්පර 1.5, කණුවකට තත්පර 2 සහ කණුවකට තත්පර 3; උපකරණවල විවිධ පිරිවිතර පහක්.
4. එකම ෂෙල් රාමු නිෂ්පාදනයට එක් ක්ලික් කිරීමකින් විවිධ ධ්රැව අංක අතර මාරු විය හැක; විවිධ ෂෙල් රාමු නිෂ්පාදන සඳහා අච්චු හෝ සවි කිරීම් අතින් ආදේශ කිරීම අවශ්ය වේ.
5. නිෂ්පාදන ආකෘතියට අනුව උපකරණ සවිකිරීම් අභිරුචිකරණය කළ හැකිය.
6. ලේසර් පරාමිතීන් ස්වයංක්රීයව ලබා ගැනීම සහ සලකුණු කිරීම සඳහා පාලන පද්ධතියේ පූර්ව ගබඩා කළ හැක; සලකුණු කිරීමේ QR කේත පරාමිති අත්තනෝමතික ලෙස සැකසිය හැක, සාමාන්යයෙන් ≤ 24 bit.
7. උපකරණවල දෝෂ අනතුරු ඇඟවීම සහ පීඩන නිරීක්ෂණ වැනි අනතුරු ඇඟවීමේ සංදර්ශක කාර්යයන් ඇත.
8. මෙහෙයුම් පද්ධති දෙකක් තිබේ: චීන සහ ඉංග්රීසි.
9. සියලුම මූලික උපාංග ඉතාලිය, ස්වීඩනය, ජර්මනිය, ජපානය, එක්සත් ජනපදය, තායිවානය වැනි විවිධ රටවලින් සහ ප්රදේශවලින් ආනයනය කර ඇත.
10. උපාංගය "Smart Energy Analysis and Energy Conservation Management System" සහ "Smart Equipment Service Big Data Cloud Platform" වැනි කාර්යයන් වලින් සමන්විත විය හැක.
11. ස්වාධීන සහ ස්වාධීන බුද්ධිමය දේපල අයිතිවාසිකම් තිබීම





