

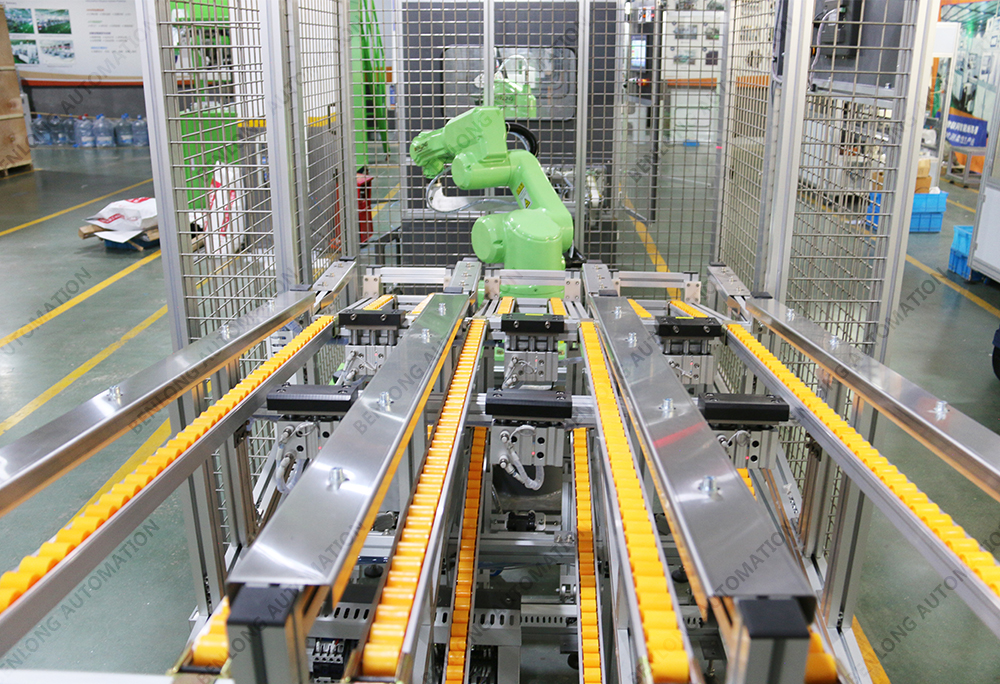
Barkirin û rakirina otomatîkî ya robotên parastinê yên gemarê
Zêdetir Binêr>>

1. voltaja ketina amûrê 220V/380V ± 10%, 50Hz; ± 1Hz;
2. Polên lihevhatî yên cîhazê: 1P, 2P, 3P, 4P, 5P
3. Rîtma hilberîna amûran: 1 çirke ji bo pole, 1,2 çirke ji bo pole, 1,5 seconds per pole, 2 seconds per pole, û 3 seconds per pole; Pênc taybetmendiyên cihêreng ên alavan.
4. Heman hilbera çarçoweya şêlê dikare bi yek klîk di navbera hejmarên polên cihêreng de biguhezîne; Berhemên çarçoweya şêlê yên cihêreng pêdivî bi guheztina bi destan a qalib an pêlavan heye.
5. Pêdiviyên alavan dikarin li gorî modela hilberê bêne xweş kirin.
6. Parametreyên lazer dikarin di pergala kontrolê de ji bo vegerandin û nîşankirina otomatîkî pêş de werin hilanîn; Parametreyên koda QR-ya nîşankirinê dikarin bi kêfî werin danîn, bi gelemperî ≤ 24 bit.
7. Amûr fonksiyonên nîşana alarmê yên wekî alarma xeletiyê û çavdêriya zextê heye.
8. Du pergalên xebitandinê hene: Çînî û Îngilîzî.
9. Hemî aksesûarên bingehîn ji welat û herêmên cûda yên wekî Italytalya, Swêd, Almanya, Japonya, Dewletên Yekbûyî, Taywan, hwd têne derxistin.
10. Amûr dikare bi fonksiyonên wekî "Pergala Birêvebiriya Parzûnkirina Enerjiyê û Analîzên Zehf" û "Platforma Ewrê Daneyên Mezin a Xizmeta Kevirên Zêrîn" were saz kirin.
11. Xwedî mafê milkiyeta rewşenbîrî ya serbixwe û serbixwe





