

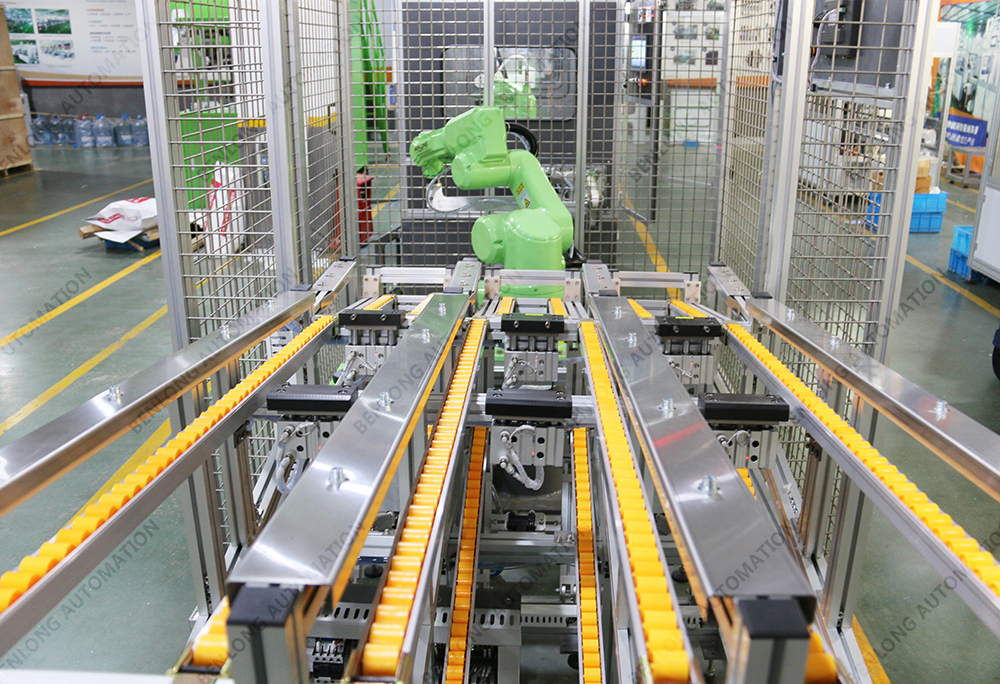
Robotê SPD Surge parastvanê barkirin û barkirina otomatîkî
Zêdetir Binêr>>



1, voltaja têketina amûrê 220V/380V ± 10%, 50Hz; ± 1Hz;
2, alavên ku bi hejmara polan re hevaheng in: 1P, 2P, 3P, 4P, 5P
3, lêdana hilberîna alavan: 1 çirke / pole, 1,2 çirke / pole, 1,5 çirke / pole, 2 çirk / pole, 3 çirk / pole; pênc taybetmendiyên cuda yên cîhazê.
4, heman hilberên çarçoweya şêlê, polên cûda dikarin bi yek mifteyê ve werin guheztin; Pêdivî ye ku hilberên çarçoweya şêlê yên cihêreng bi destan qalib an sazûmanê biguhezînin.
5, Çêkirina alavan dikare li gorî modela hilberê were xweş kirin.
6, Parametreyên lazerê dikarin di pergala kontrolê de pêşî werin hilanîn, gihîştina otomatîkî ya nîşankirinê; nîşankirina parametreyên koda du-alî dikare bi kêfî were danîn, bi gelemperî ≤ 24 bit.
7, Amûrên bi alarma xeletiyê, çavdêriya zextê û fonksiyonên din ên nîşana alarmê.
8, Guhertoya Çînî û Îngilîzî ya du pergalên xebitandinê.
9, hemî beşên bingehîn ji Italytalya, Swêd, Almanya, Japonya, Dewletên Yekbûyî, Taywan û welat û deverên din têne derxistin.
10, amûr dikare "pergala rêveberiya enerjiyê ya hişmend û pergala rêveberiya enerjiyê" û "platforma ewr a daneya mezin a karûbarê amûra aqilmend" û fonksiyonên din vebijarkî be.
11. Mafên milkiyeta rewşenbîrî ya serbixwe





