

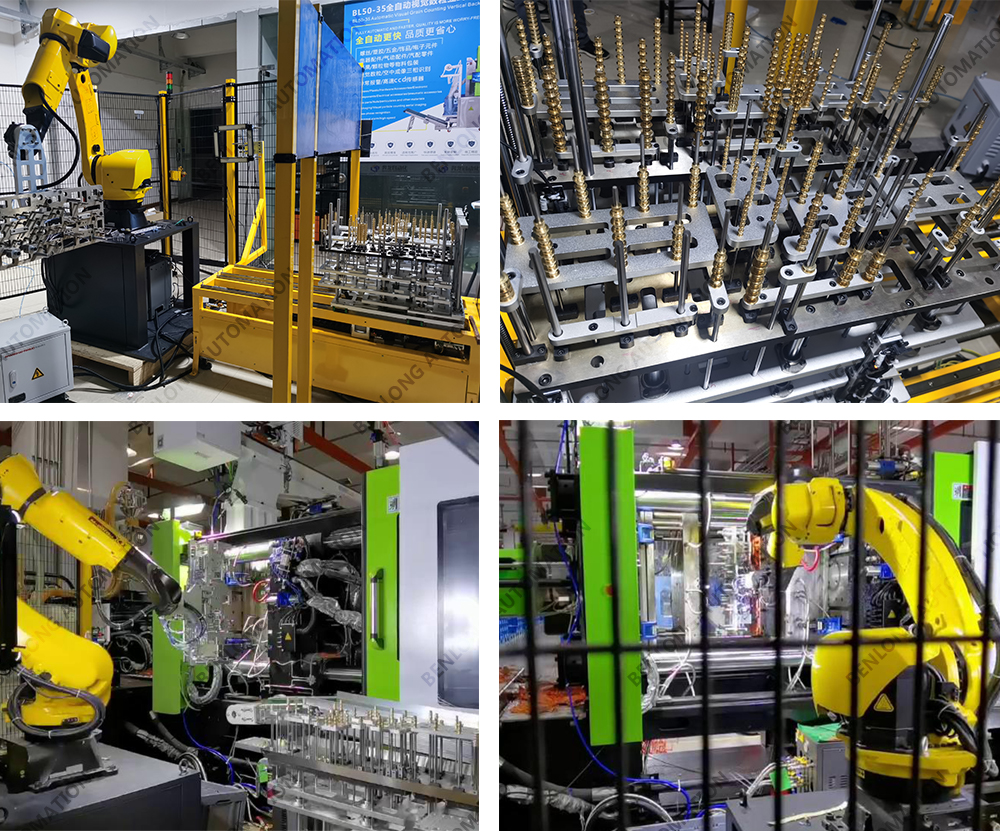
로봇 인서트의 자동 로딩 및 언로딩
더 보기>>
1. 장비 입력 전압: 380V ± 10%, 50Hz; ± 1Hz;
2. 장비 호환성 및 생산 효율성: 고객 요구 사항에 따라 맞춤 설정할 수 있습니다.
3. 조립 방법: 제품의 다양한 생산 공정 및 요구 사항에 따라 제품의 자동 조립이 가능합니다.
4. 장비 고정 장치는 제품 모델에 따라 맞춤 설정할 수 있습니다.
5. 장비에는 오류 경보 및 압력 모니터링과 같은 경보 표시 기능이 있습니다.
6. 중국어와 영어의 두 가지 운영 체제를 사용할 수 있습니다.
7. 모든 핵심 액세서리는 이탈리아, 스웨덴, 독일, 일본, 미국, 대만 등과 같은 다양한 국가 및 지역에서 수입됩니다.
8. '스마트 에너지 분석 및 에너지 절약 관리 시스템', '스마트 장비 서비스 빅데이터 클라우드 플랫폼' 등의 기능을 탑재할 수 있다.
9. 독립적이고 독립적인 지적재산권을 보유합니다.
여기에 메시지를 작성하여 보내주세요.





