

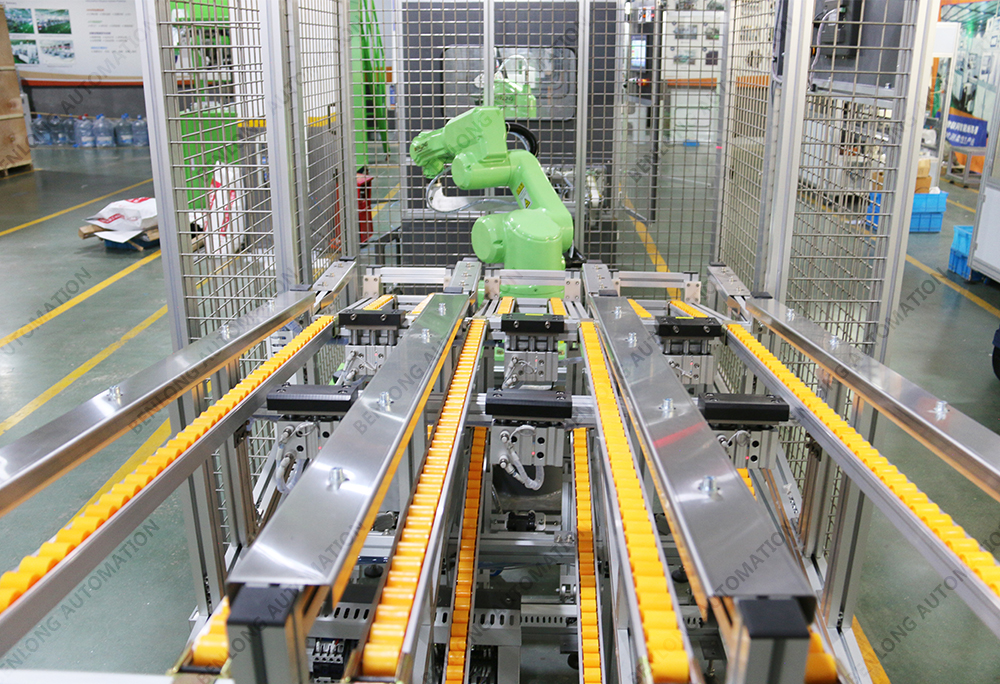
Aŭtomata ŝarĝo kaj malŝarĝo de ŝprucprotektantaj robotoj
Vidu Pli>>

1. Ekipaĵo eniga tensio 220V/380V ± 10%, 50Hz; ± 1Hz;
2. Aparataj kongruaj polusoj: 1P, 2P, 3P, 4P, 5P
3. Ritmo de produktado de ekipaĵo: 1 sekundoj por poluso, 1.2 sekundoj por poluso, 1.5 sekundoj por poluso, 2 sekundoj por polo, kaj 3 sekundoj por poluso; Kvin malsamaj specifoj de ekipaĵo.
4. La sama ŝelkadra produkto povas ŝanĝi inter malsamaj polusaj nombroj per unu klako; Malsamaj ŝelkadraj produktoj postulas manan anstataŭigon de muldiloj aŭ fiksaĵoj.
5. La ekipaĵaj aparatoj povas esti personecigitaj laŭ la produkta modelo.
6. Lasero-parametroj povas esti pre stokitaj en la kontrolsistemo por aŭtomata reakiro kaj markado; La markadaj QR-kodo-parametroj povas esti agordeble, ĝenerale ≤ 24 bitoj.
7. La ekipaĵo havas alarmajn ekranajn funkciojn kiel kulpo-alarmo kaj premo-monitorado.
8. Estas du operaciumoj disponeblaj: la ĉina kaj la angla.
9. Ĉiuj kernaj akcesoraĵoj estas importitaj el diversaj landoj kaj regionoj kiel Italio, Svedio, Germanio, Japanio, Usono, Tajvano ktp.
10. La aparato povas esti ekipita per funkcioj kiel la "Smart Energy Analysis and Energy Conservation Management System" kaj la "Smart Equipment Service Big Data Cloud Platform".
11. Havante sendependajn kaj sendependajn rajtojn pri intelekta proprieto





