

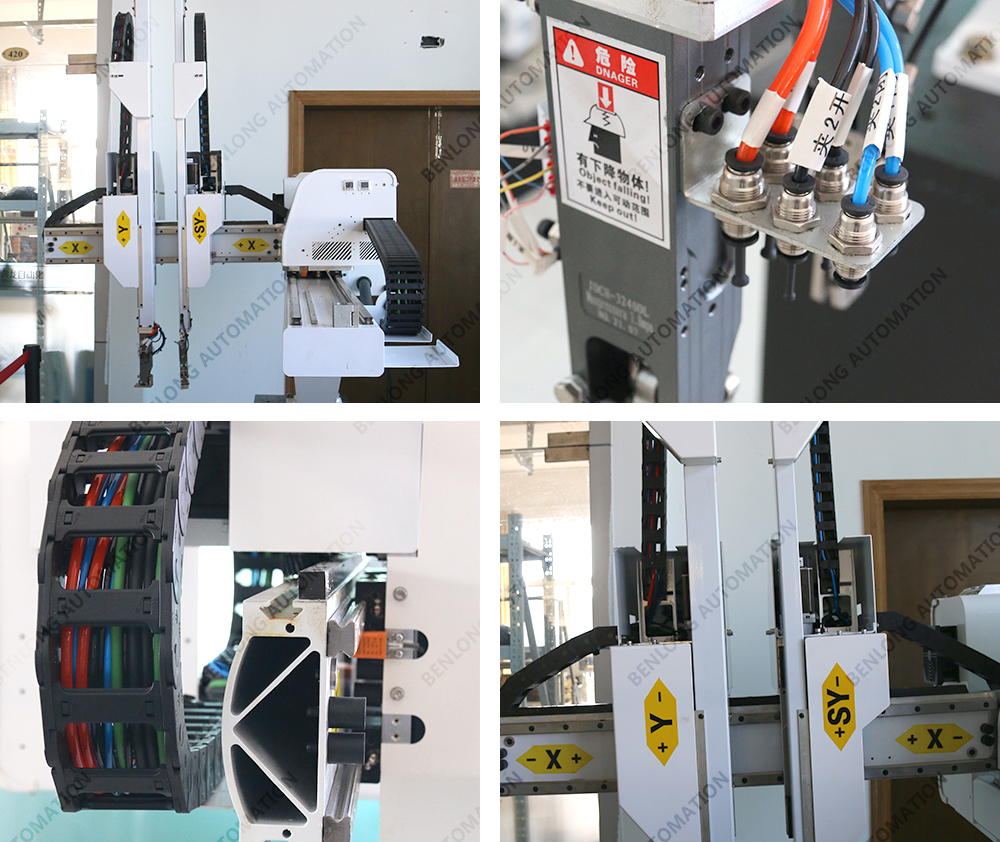
Манипулятори қолаби сӯзандору
Бештар нигаред>>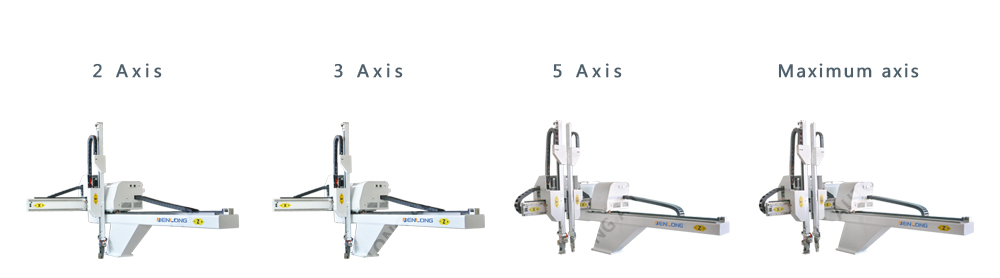
Таъмини барқ: 1CAC220V + 10V50 / 60HZ
Фишори ҳавои корӣ: 5kgf / cm20.49Mpa
Максимум фишори ҳаво иҷозатдодашуда: 8kgf / cm0.8Mpa
Усули Drive: XZ инвертер ypeneumatic Cylinder
Зези: 90 Собит Пневматикӣ
системаи назорат
Назорати NC
Паёми худро дар ин ҷо нависед ва ба мо бифиристед





